Involutional 신경망
- 원본 링크 : https://keras.io/examples/vision/involution/
- 최종 확인 : 2024-11-20
저자 : Aritra Roy Gosthipaty
생성일 : 2021/07/25
최종 편집일 : 2021/07/25
설명 : 위치별 및 채널에 구애받지 않는(location-specific and channel-agnostic) “인볼루션(involution)” 커널에 대해 자세히 알아봅니다.
소개
컨볼루션은 대부분의 최신 컴퓨터 비전을 위한 신경망의 기반이 되었습니다. 컨볼루션 커널은 공간에 구애받지 않고(spatial-agnostic) 채널에 따라(channel-specific) 달라집니다. 따라서, 공간적 위치에 따라 다른 시각적 패턴에 적응할 수 없습니다. 위치 관련 문제와 함께, 컨볼루션의 수용 영역은 장거리 공간 상호 작용을 캡처하는 데 어려움을 겪습니다.
위의 문제를 해결하기 위해, Li et. al.은 Involution: 시각 인식을 위한 컨볼루션의 내재적 반전(Inverting the Inherence of Convolution for VisualRecognition)에서 컨볼루션의 속성을 재고합니다. 저자들은 위치 특정적이고 채널에 구애받지 않는(location-specific and channel-agnostic) “인볼루션 커널(involution kernel)“을 제안합니다. 저자들은 연산의 위치 특정적(location-specific) 특성으로 인해, 셀프 어텐션이 인볼루션의 설계 패러다임에 해당한다고 말합니다.
이 예에서는 인볼루션 커널에 대해 설명하고, 컨볼루션과 인볼루션을 사용한 두 가지 이미지 분류 모델을 비교하며, 셀프 어텐션 레이어와 유사하게 그려봅니다.
셋업
import os
os.environ["KERAS_BACKEND"] = "tensorflow"
import tensorflow as tf
import keras
import matplotlib.pyplot as plt
# 재현성을 위해 시드를 설정합니다.
tf.random.set_seed(42)컨볼루션
컨볼루션은 컴퓨터 비전을 위한 심층 신경망의 주축을 이루고 있습니다. 인볼루션을 이해하려면, 컨볼루션 연산에 대해 이야기할 필요가 있습니다.
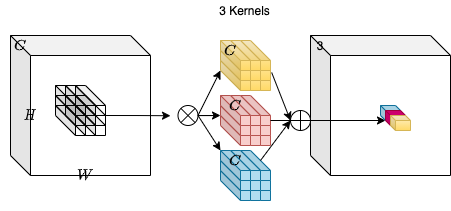
차원이 H, W, C_in인 입력 텐서 X를 생각해 봅시다. 우리는 각각 K, K, C_in 형태의 C_out 컨볼루션 커널의 모음을 취합니다. 입력 텐서와 커널 사이의 곱하기 덧셈 연산(multiply-add operation)을 통해, H, W, C_out 차원의 출력 텐서 Y를 얻습니다.
위의 다이어그램에서 C_out=3입니다.
이렇게 하면 H, W, 3 형태의 출력 텐서가 됩니다.
컨볼루션 커널은 입력 텐서의 공간적 위치에 의존하지 않기 때문에,
위치 불가지론적(location-agnostic) 이라는 것을 알 수 있습니다.
반면, 출력 텐서의 각 채널은 특정 컨볼루션 필터를 기반으로 하므로 채널별(channel-specific) 입니다.
인볼루션
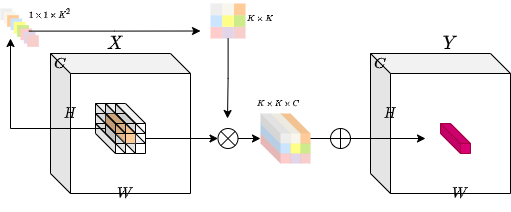
이 아이디어는 위치에 따라 달라지는(location-specific) 작업과 채널에 구애받지 않는(channel-agnostic) 작업을 모두 구현하는 것입니다. 이러한 특정 속성을 구현하는 데는 어려움이 있습니다. (각 공간 위치에 대해) 고정된 수의 인볼루션 커널을 사용하면, 가변 해상도 입력 텐서를 처리할 수 없게 됩니다.
이 문제를 해결하기 위해, 저자들은 특정 공간 위치에 따라 각 커널을 생성 하는 방법을 고려했습니다. 이 방법을 사용하면, 가변 해상도 입력 텐서를 쉽게 처리할 수 있을 것입니다. 아래 다이어그램은 이 커널 생성 방법에 대한 직관을 제공합니다.
class Involution(keras.layers.Layer):
def __init__(
self, channel, group_number, kernel_size, stride, reduction_ratio, name
):
super().__init__(name=name)
# 매개 변수를 초기화.
self.channel = channel
self.group_number = group_number
self.kernel_size = kernel_size
self.stride = stride
self.reduction_ratio = reduction_ratio
def build(self, input_shape):
# 입력의 모양을 가져오기.
(_, height, width, num_channels) = input_shape
# 보폭(strides)에 따라 높이와 너비를 조정.
height = height // self.stride
width = width // self.stride
# 스트라이드가 1보다 큰 경우, 입력 텐서를 평균 풀링하는 레이어를 정의.
self.stride_layer = (
keras.layers.AveragePooling2D(
pool_size=self.stride, strides=self.stride, padding="same"
)
if self.stride > 1
else tf.identity
)
# 커널 생성 레이어를 정의.
self.kernel_gen = keras.Sequential(
[
keras.layers.Conv2D(
filters=self.channel // self.reduction_ratio, kernel_size=1
),
keras.layers.BatchNormalization(),
keras.layers.ReLU(),
keras.layers.Conv2D(
filters=self.kernel_size * self.kernel_size * self.group_number,
kernel_size=1,
),
]
)
# reshape 레이어 정의
self.kernel_reshape = keras.layers.Reshape(
target_shape=(
height,
width,
self.kernel_size * self.kernel_size,
1,
self.group_number,
)
)
self.input_patches_reshape = keras.layers.Reshape(
target_shape=(
height,
width,
self.kernel_size * self.kernel_size,
num_channels // self.group_number,
self.group_number,
)
)
self.output_reshape = keras.layers.Reshape(
target_shape=(height, width, num_channels)
)
def call(self, x):
# 입력 텐서를 기준으로 커널을 생성.
# B, H, W, K*K*G
kernel_input = self.stride_layer(x)
kernel = self.kernel_gen(kernel_input)
# 커널 reshape
# B, H, W, K*K, 1, G
kernel = self.kernel_reshape(kernel)
# 입력 패치 추출.
# B, H, W, K*K*C
input_patches = tf.image.extract_patches(
images=x,
sizes=[1, self.kernel_size, self.kernel_size, 1],
strides=[1, self.stride, self.stride, 1],
rates=[1, 1, 1, 1],
padding="SAME",
)
# 이후 연산에 맞게 입력 패치를 reshape.
# B, H, W, K*K, C//G, G
input_patches = self.input_patches_reshape(input_patches)
# 커널과 패치의 곱하기 덧셈(multiply-add) 연산을 계산.
# B, H, W, K*K, C//G, G
output = tf.multiply(kernel, input_patches)
# B, H, W, C//G, G
output = tf.reduce_sum(output, axis=3)
# 출력 커널 Reshape.
# B, H, W, C
output = self.output_reshape(output)
# 출력 텐서와 커널을 반환.
return output, kernel인볼루션 레이어 테스트하기
# 입력 텐서를 정의.
input_tensor = tf.random.normal((32, 256, 256, 3))
# 스트라이드 1로 인볼루션을 계산.
output_tensor, _ = Involution(
channel=3, group_number=1, kernel_size=5, stride=1, reduction_ratio=1, name="inv_1"
)(input_tensor)
print(f"with stride 1 ouput shape: {output_tensor.shape}")
# 스트라이드 2로 인볼루션을 계산.
output_tensor, _ = Involution(
channel=3, group_number=1, kernel_size=5, stride=2, reduction_ratio=1, name="inv_2"
)(input_tensor)
print(f"with stride 2 ouput shape: {output_tensor.shape}")
# 스트라이드 1, 채널 16, reduction ratio 2로 인볼루션을 계산.
output_tensor, _ = Involution(
channel=16, group_number=1, kernel_size=5, stride=1, reduction_ratio=2, name="inv_3"
)(input_tensor)
print(
"with channel 16 and reduction ratio 2 ouput shape: {}".format(output_tensor.shape)
)결과
with stride 1 ouput shape: (32, 256, 256, 3)
with stride 2 ouput shape: (32, 128, 128, 3)
with channel 16 and reduction ratio 2 ouput shape: (32, 256, 256, 3)이미지 분류
이 섹션에서는, 이미지 분류기 모델을 빌드하겠습니다. 컨볼루션을 사용하는 모델과 인볼루션을 사용하는 모델 두 가지를 만들 것입니다.
이미지 분류 모델은 Google의 컨볼루션 신경망(CNN) 튜토리얼에서 많은 영감을 받았습니다.
CIFAR10 데이터세트 얻기
# CIFAR10 데이터세트 로드.
print("loading the CIFAR10 dataset...")
(
(train_images, train_labels),
(
test_images,
test_labels,
),
) = keras.datasets.cifar10.load_data()
# 픽셀 값을 0에서 1 사이로 정규화.
(train_images, test_images) = (train_images / 255.0, test_images / 255.0)
# 데이터 세트를 셔플하고 배치화.
train_ds = (
tf.data.Dataset.from_tensor_slices((train_images, train_labels))
.shuffle(256)
.batch(256)
)
test_ds = tf.data.Dataset.from_tensor_slices((test_images, test_labels)).batch(256)결과
loading the CIFAR10 dataset...데이터 시각화
class_names = [
"airplane",
"automobile",
"bird",
"cat",
"deer",
"dog",
"frog",
"horse",
"ship",
"truck",
]
plt.figure(figsize=(10, 10))
for i in range(25):
plt.subplot(5, 5, i + 1)
plt.xticks([])
plt.yticks([])
plt.grid(False)
plt.imshow(train_images[i])
plt.xlabel(class_names[train_labels[i][0]])
plt.show()
컨볼루션 신경망
# conv 모델 빌드.
print("building the convolution model...")
conv_model = keras.Sequential(
[
keras.layers.Conv2D(32, (3, 3), input_shape=(32, 32, 3), padding="same"),
keras.layers.ReLU(name="relu1"),
keras.layers.MaxPooling2D((2, 2)),
keras.layers.Conv2D(64, (3, 3), padding="same"),
keras.layers.ReLU(name="relu2"),
keras.layers.MaxPooling2D((2, 2)),
keras.layers.Conv2D(64, (3, 3), padding="same"),
keras.layers.ReLU(name="relu3"),
keras.layers.Flatten(),
keras.layers.Dense(64, activation="relu"),
keras.layers.Dense(10),
]
)
# 필요한 손실 함수 및 옵티마이저를 사용하여 모델을 컴파일.
print("compiling the convolution model...")
conv_model.compile(
optimizer="adam",
loss=keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=["accuracy"],
)
# 모델 트레이닝.
print("conv model training...")
conv_hist = conv_model.fit(train_ds, epochs=20, validation_data=test_ds)결과
building the convolution model...
compiling the convolution model...
conv model training...
Epoch 1/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 6s 15ms/step - accuracy: 0.3068 - loss: 1.9000 - val_accuracy: 0.4861 - val_loss: 1.4593
Epoch 2/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 4ms/step - accuracy: 0.5153 - loss: 1.3603 - val_accuracy: 0.5741 - val_loss: 1.1913
Epoch 3/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.5949 - loss: 1.1517 - val_accuracy: 0.6095 - val_loss: 1.0965
Epoch 4/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.6414 - loss: 1.0330 - val_accuracy: 0.6260 - val_loss: 1.0635
Epoch 5/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.6690 - loss: 0.9485 - val_accuracy: 0.6622 - val_loss: 0.9833
Epoch 6/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.6951 - loss: 0.8764 - val_accuracy: 0.6783 - val_loss: 0.9413
Epoch 7/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.7122 - loss: 0.8167 - val_accuracy: 0.6856 - val_loss: 0.9134
Epoch 8/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 4ms/step - accuracy: 0.7299 - loss: 0.7709 - val_accuracy: 0.7001 - val_loss: 0.8792
Epoch 9/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 4ms/step - accuracy: 0.7467 - loss: 0.7288 - val_accuracy: 0.6992 - val_loss: 0.8821
Epoch 10/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 4ms/step - accuracy: 0.7591 - loss: 0.6982 - val_accuracy: 0.7235 - val_loss: 0.8237
Epoch 11/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 4ms/step - accuracy: 0.7725 - loss: 0.6550 - val_accuracy: 0.7115 - val_loss: 0.8521
Epoch 12/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.7808 - loss: 0.6302 - val_accuracy: 0.7051 - val_loss: 0.8823
Epoch 13/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.7860 - loss: 0.6101 - val_accuracy: 0.7122 - val_loss: 0.8635
Epoch 14/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.7998 - loss: 0.5786 - val_accuracy: 0.7214 - val_loss: 0.8348
Epoch 15/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.8117 - loss: 0.5473 - val_accuracy: 0.7139 - val_loss: 0.8835
Epoch 16/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.8168 - loss: 0.5267 - val_accuracy: 0.7155 - val_loss: 0.8840
Epoch 17/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.8266 - loss: 0.5022 - val_accuracy: 0.7239 - val_loss: 0.8576
Epoch 18/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.8374 - loss: 0.4750 - val_accuracy: 0.7262 - val_loss: 0.8756
Epoch 19/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.8452 - loss: 0.4505 - val_accuracy: 0.7235 - val_loss: 0.9049
Epoch 20/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 4ms/step - accuracy: 0.8531 - loss: 0.4283 - val_accuracy: 0.7304 - val_loss: 0.8962인볼루션 신경망
# 인볼루션 모델을 빌드.
print("building the involution model...")
inputs = keras.Input(shape=(32, 32, 3))
x, _ = Involution(
channel=3, group_number=1, kernel_size=3, stride=1, reduction_ratio=2, name="inv_1"
)(inputs)
x = keras.layers.ReLU()(x)
x = keras.layers.MaxPooling2D((2, 2))(x)
x, _ = Involution(
channel=3, group_number=1, kernel_size=3, stride=1, reduction_ratio=2, name="inv_2"
)(x)
x = keras.layers.ReLU()(x)
x = keras.layers.MaxPooling2D((2, 2))(x)
x, _ = Involution(
channel=3, group_number=1, kernel_size=3, stride=1, reduction_ratio=2, name="inv_3"
)(x)
x = keras.layers.ReLU()(x)
x = keras.layers.Flatten()(x)
x = keras.layers.Dense(64, activation="relu")(x)
outputs = keras.layers.Dense(10)(x)
inv_model = keras.Model(inputs=[inputs], outputs=[outputs], name="inv_model")
# 필요한 손실 함수 및 옵티마이저를 사용하여 모델을 컴파일.
print("compiling the involution model...")
inv_model.compile(
optimizer="adam",
loss=keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=["accuracy"],
)
# 모델 트레이닝
print("inv model training...")
inv_hist = inv_model.fit(train_ds, epochs=20, validation_data=test_ds)결과
building the involution model...
compiling the involution model...
inv model training...
Epoch 1/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 9s 25ms/step - accuracy: 0.1369 - loss: 2.2728 - val_accuracy: 0.2716 - val_loss: 2.1041
Epoch 2/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.2922 - loss: 1.9489 - val_accuracy: 0.3478 - val_loss: 1.8275
Epoch 3/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.3477 - loss: 1.8098 - val_accuracy: 0.3782 - val_loss: 1.7435
Epoch 4/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.3741 - loss: 1.7420 - val_accuracy: 0.3901 - val_loss: 1.6943
Epoch 5/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.3931 - loss: 1.6942 - val_accuracy: 0.4007 - val_loss: 1.6639
Epoch 6/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.4057 - loss: 1.6622 - val_accuracy: 0.4108 - val_loss: 1.6494
Epoch 7/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4134 - loss: 1.6374 - val_accuracy: 0.4202 - val_loss: 1.6363
Epoch 8/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4200 - loss: 1.6166 - val_accuracy: 0.4312 - val_loss: 1.6062
Epoch 9/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.4286 - loss: 1.5949 - val_accuracy: 0.4316 - val_loss: 1.6018
Epoch 10/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.4346 - loss: 1.5794 - val_accuracy: 0.4346 - val_loss: 1.5963
Epoch 11/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4395 - loss: 1.5641 - val_accuracy: 0.4388 - val_loss: 1.5831
Epoch 12/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 5ms/step - accuracy: 0.4445 - loss: 1.5502 - val_accuracy: 0.4443 - val_loss: 1.5826
Epoch 13/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4493 - loss: 1.5391 - val_accuracy: 0.4497 - val_loss: 1.5574
Epoch 14/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4528 - loss: 1.5255 - val_accuracy: 0.4547 - val_loss: 1.5433
Epoch 15/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 4ms/step - accuracy: 0.4575 - loss: 1.5148 - val_accuracy: 0.4548 - val_loss: 1.5438
Epoch 16/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4599 - loss: 1.5072 - val_accuracy: 0.4581 - val_loss: 1.5323
Epoch 17/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4664 - loss: 1.4957 - val_accuracy: 0.4598 - val_loss: 1.5321
Epoch 18/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4701 - loss: 1.4863 - val_accuracy: 0.4575 - val_loss: 1.5302
Epoch 19/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4737 - loss: 1.4790 - val_accuracy: 0.4676 - val_loss: 1.5233
Epoch 20/20
196/196 ━━━━━━━━━━━━━━━━━━━━ 1s 6ms/step - accuracy: 0.4771 - loss: 1.4740 - val_accuracy: 0.4719 - val_loss: 1.5096비교
이 섹션에서는, 두 모델을 살펴보고 몇 가지 요점을 비교해 보겠습니다.
파라미터
비슷한 아키텍처의 경우, CNN의 파라미터가 INN(인볼루션 신경망)보다 훨씬 더 크다는 것을 알 수 있습니다.
conv_model.summary()
inv_model.summary()결과
Model: "sequential_3"
┏━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━┓
┃ Layer (type) ┃ Output Shape ┃ Param # ┃
┡━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━┩
│ conv2d_6 (Conv2D) │ (None, 32, 32, 32) │ 896 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ relu1 (ReLU) │ (None, 32, 32, 32) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ max_pooling2d (MaxPooling2D) │ (None, 16, 16, 32) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ conv2d_7 (Conv2D) │ (None, 16, 16, 64) │ 18,496 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ relu2 (ReLU) │ (None, 16, 16, 64) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ max_pooling2d_1 (MaxPooling2D) │ (None, 8, 8, 64) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ conv2d_8 (Conv2D) │ (None, 8, 8, 64) │ 36,928 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ relu3 (ReLU) │ (None, 8, 8, 64) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ flatten (Flatten) │ (None, 4096) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ dense (Dense) │ (None, 64) │ 262,208 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ dense_1 (Dense) │ (None, 10) │ 650 │
└─────────────────────────────────┴───────────────────────────┴────────────┘
Total params: 957,536 (3.65 MB)
Trainable params: 319,178 (1.22 MB)
Non-trainable params: 0 (0.00 B)
Optimizer params: 638,358 (2.44 MB)
Model: "inv_model"
┏━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━┓
┃ Layer (type) ┃ Output Shape ┃ Param # ┃
┡━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━┩
│ input_layer_4 (InputLayer) │ (None, 32, 32, 3) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ inv_1 (Involution) │ [(None, 32, 32, 3), │ 26 │
│ │ (None, 32, 32, 9, 1, 1)] │ │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ re_lu_4 (ReLU) │ (None, 32, 32, 3) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ max_pooling2d_2 (MaxPooling2D) │ (None, 16, 16, 3) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ inv_2 (Involution) │ [(None, 16, 16, 3), │ 26 │
│ │ (None, 16, 16, 9, 1, 1)] │ │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ re_lu_6 (ReLU) │ (None, 16, 16, 3) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ max_pooling2d_3 (MaxPooling2D) │ (None, 8, 8, 3) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ inv_3 (Involution) │ [(None, 8, 8, 3), (None, │ 26 │
│ │ 8, 8, 9, 1, 1)] │ │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ re_lu_8 (ReLU) │ (None, 8, 8, 3) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ flatten_1 (Flatten) │ (None, 192) │ 0 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ dense_2 (Dense) │ (None, 64) │ 12,352 │
├─────────────────────────────────┼───────────────────────────┼────────────┤
│ dense_3 (Dense) │ (None, 10) │ 650 │
└─────────────────────────────────┴───────────────────────────┴────────────┘
Total params: 39,230 (153.25 KB)
Trainable params: 13,074 (51.07 KB)
Non-trainable params: 6 (24.00 B)
Optimizer params: 26,150 (102.15 KB)손실 및 정확도 플롯
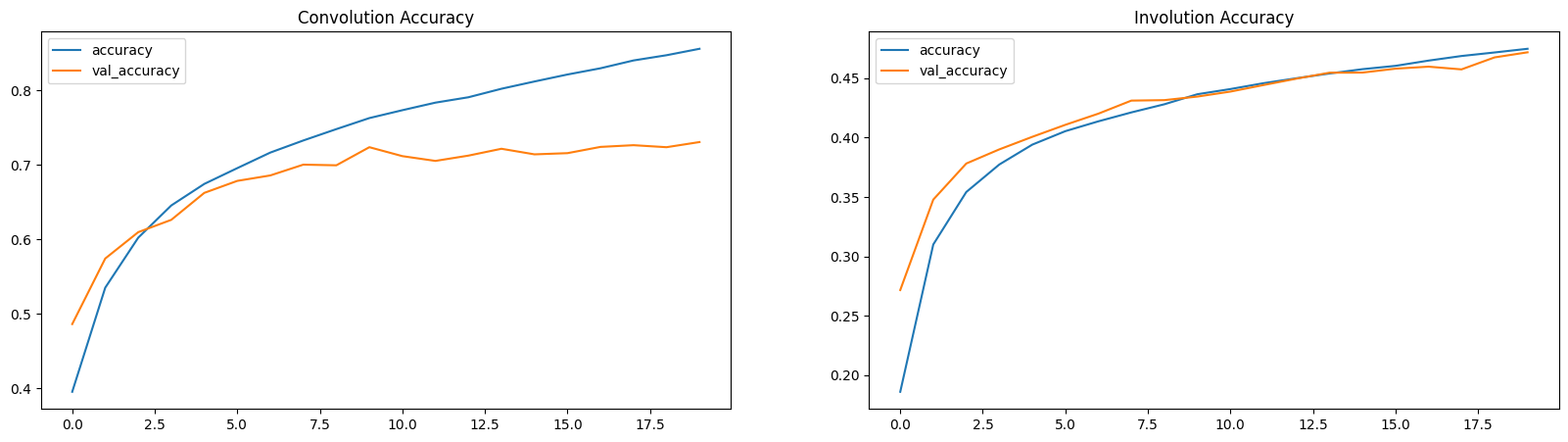
여기서, 손실 및 정확도 플롯은 INN이 (적은 매개변수로) 느린 학습자임을 보여줍니다.
plt.figure(figsize=(20, 5))
plt.subplot(1, 2, 1)
plt.title("Convolution Loss")
plt.plot(conv_hist.history["loss"], label="loss")
plt.plot(conv_hist.history["val_loss"], label="val_loss")
plt.legend()
plt.subplot(1, 2, 2)
plt.title("Involution Loss")
plt.plot(inv_hist.history["loss"], label="loss")
plt.plot(inv_hist.history["val_loss"], label="val_loss")
plt.legend()
plt.show()
plt.figure(figsize=(20, 5))
plt.subplot(1, 2, 1)
plt.title("Convolution Accuracy")
plt.plot(conv_hist.history["accuracy"], label="accuracy")
plt.plot(conv_hist.history["val_accuracy"], label="val_accuracy")
plt.legend()
plt.subplot(1, 2, 2)
plt.title("Involution Accuracy")
plt.plot(inv_hist.history["accuracy"], label="accuracy")
plt.plot(inv_hist.history["val_accuracy"], label="val_accuracy")
plt.legend()
plt.show()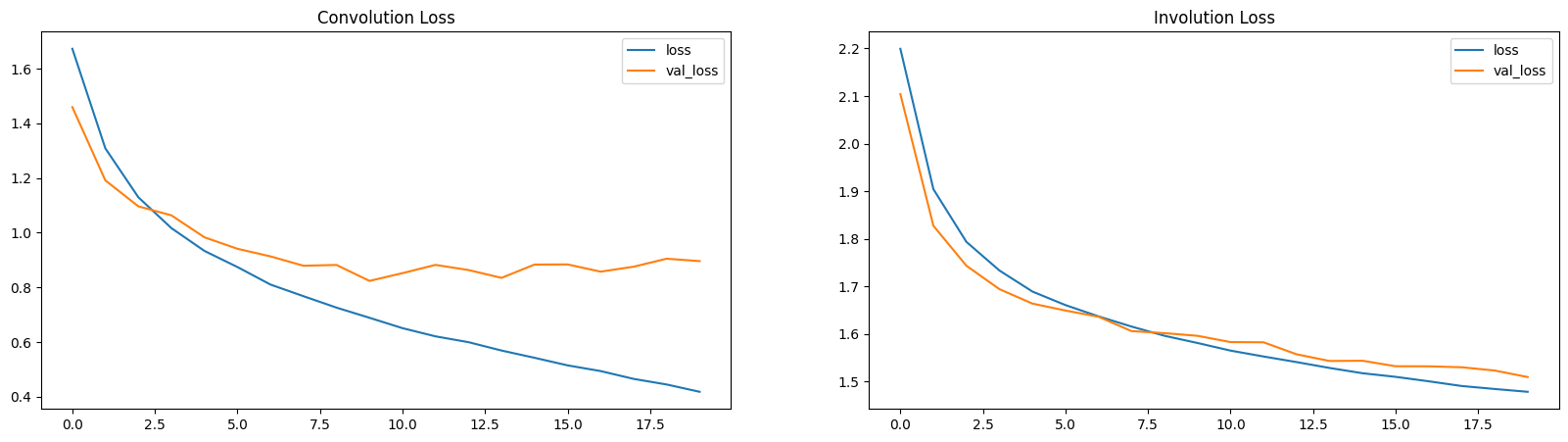
인볼루션 커널 시각화
커널을 시각화하기 위해, 각 인볼루션 커널에서 K×K 값의 합을 구합니다. 서로 다른 공간 위치에 있는 모든 대표자(representatives)가 해당 히트 맵의 프레임을 구성합니다.
저자들은 다음과 같이 언급합니다:
“우리가 제안한 인볼루션은 셀프 어텐션을 연상시키며, 본질적으로 그것의 일반화된 버전이 될 수 있습니다.”
커널을 시각화하면 실제로 이미지의 어텐션 맵을 얻을 수 있습니다. 학습된 인볼루션 커널은 입력 텐서의 개별 공간 위치에 대한 어텐션을 제공합니다. 위치 특정적(location-specific) 속성은 셀프 어텐션이 속하는 모델의 일반적 공간으로 인볼루션을 만듭니다.
layer_names = ["inv_1", "inv_2", "inv_3"]
outputs = [inv_model.get_layer(name).output[1] for name in layer_names]
vis_model = keras.Model(inv_model.input, outputs)
fig, axes = plt.subplots(nrows=10, ncols=4, figsize=(10, 30))
for ax, test_image in zip(axes, test_images[:10]):
(inv1_kernel, inv2_kernel, inv3_kernel) = vis_model.predict(test_image[None, ...])
inv1_kernel = tf.reduce_sum(inv1_kernel, axis=[-1, -2, -3])
inv2_kernel = tf.reduce_sum(inv2_kernel, axis=[-1, -2, -3])
inv3_kernel = tf.reduce_sum(inv3_kernel, axis=[-1, -2, -3])
ax[0].imshow(keras.utils.array_to_img(test_image))
ax[0].set_title("Input Image")
ax[1].imshow(keras.utils.array_to_img(inv1_kernel[0, ..., None]))
ax[1].set_title("Involution Kernel 1")
ax[2].imshow(keras.utils.array_to_img(inv2_kernel[0, ..., None]))
ax[2].set_title("Involution Kernel 2")
ax[3].imshow(keras.utils.array_to_img(inv3_kernel[0, ..., None]))
ax[3].set_title("Involution Kernel 3")결과
1/1 ━━━━━━━━━━━━━━━━━━━━ 1s 503ms/step
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 11ms/step
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 11ms/step
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 9ms/step
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 11ms/step
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 9ms/step
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 9ms/step
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 9ms/step
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 10ms/step
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 9ms/step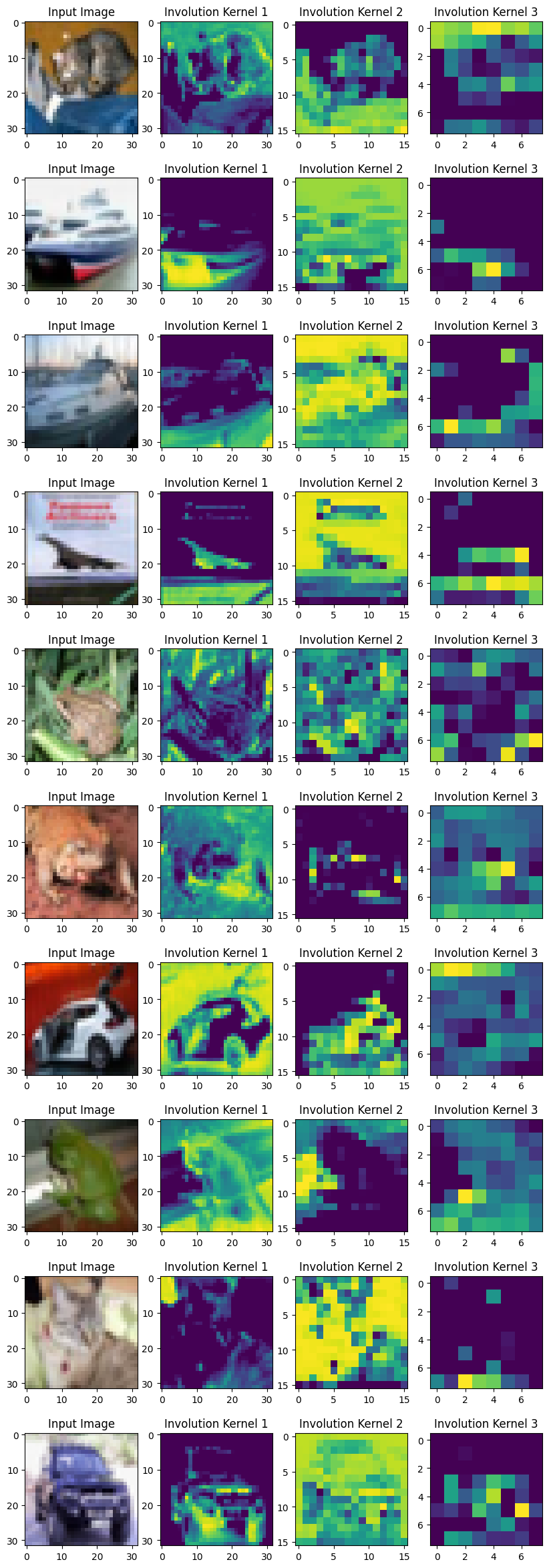
결론
이 예제에서는, 쉽게 재사용할 수 있는 Involution 레이어를 만드는 데 중점을 두었습니다.
특정 작업을 기준으로 비교했지만, 다른 작업에도 자유롭게 이 레이어를 사용해 결과를 보고해 보세요.
제가 보기에, 인볼루션의 핵심은 셀프 어텐션과의 관계입니다. 위치별(location-specific) 및 채널별(channel-spefic) 처리에 대한 직관은 많은 작업에서 의미가 있습니다.
다음을 학습함으로써, 앞으로 나아갈 수 있습니다:
- 인볼루션에 대한 Yannick의 동영상을 보면 더 잘 이해할 수 있습니다.
- 인볼루션 레이어의 다양한 하이퍼파라미터를 실험해 보세요.
- 인볼루션 레이어로 다양한 모델을 빌드해 보세요.
- 완전히 다른 커널 생성 방법을 시도하여 빌드해 보세요.
Hugging Face Hub에서 호스팅되는 트레이닝된 모델을 사용하고, Hugging Face Spaces에서 데모를 사용해 볼 수 있습니다.